因工业机器人准确、可靠、灵活等优势,越来越多的制造企业正在尝试使用工业机器人进行工件打磨、抛光、去毛刺等工作。然而给工业机器人编写精确复杂的打磨轨迹是一大难点。传统的离线编程解决方案能够解决轨迹编程复杂的问题,但是它要求工件一致性好,工作站标定精确,这使得工业机器人在打磨过程中安装、调试和使用难度依然很大。
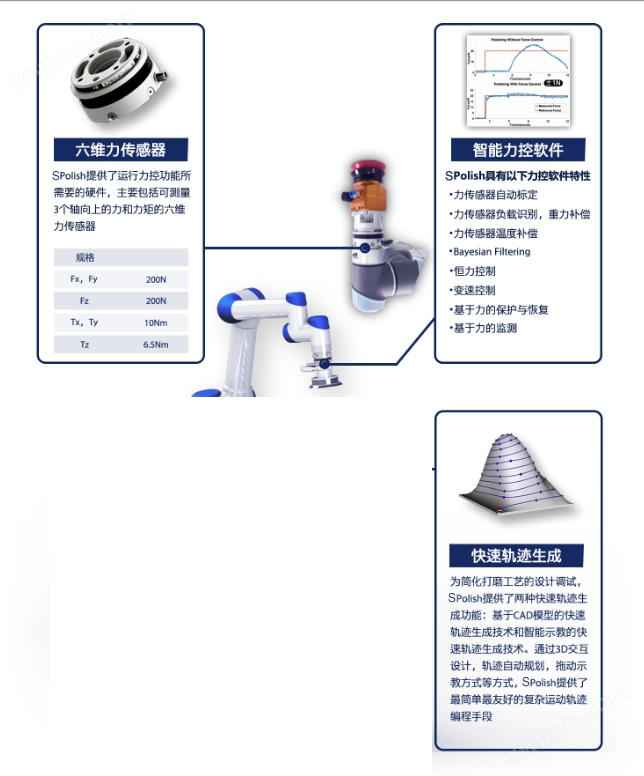
SPolish通过快速轨迹生成技术及力位混合控制技术大大简化了复杂轨迹编程问题和机器人标定问题。在打磨过程中引入力控还大大提高了工件的打磨质量,加工效率以及设备安全性。
SPolish可在4小时内对绝大部分复杂工件完成机器人打磨工艺调试,如螺旋桨,风力发电机叶片等物品。
产品优势
◇ 简单、灵活
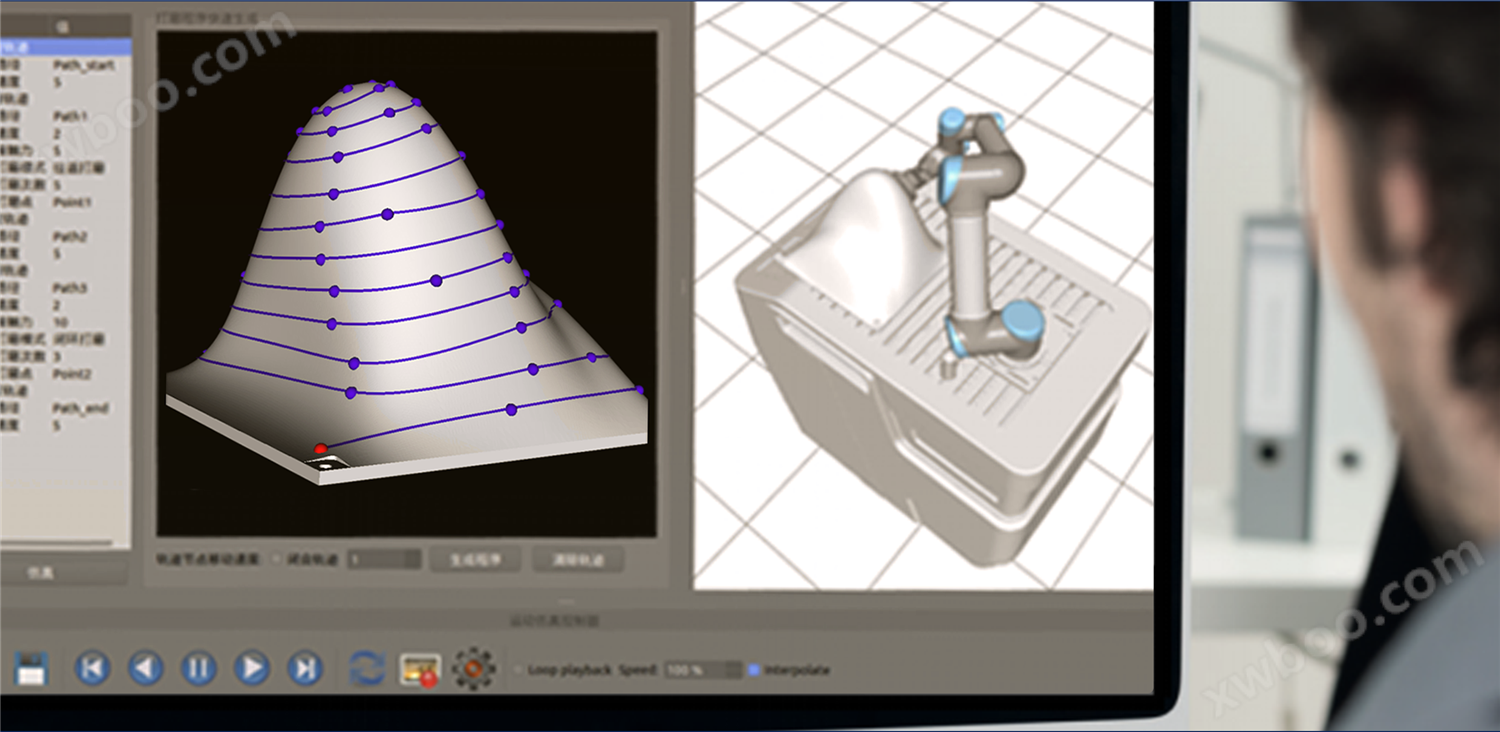
助快速轨迹生成技术和3D仿真技术,用户可快速创建复杂运动程序并验证工艺的合理性,一键优化生成机器人运动轨迹,可部署在多种机器人上。
◇ 高效、精密
借助力控技术和轨迹优化技术,可提高复杂工件的加工速度。同时可对加工过程实施恒力控制和变速控制,提高加工质量。
◇ 可靠、安全
SPolish中的力保护技术可有效确保在7*24小时稳定运行的情况下设备安全。
| SPolish性能参数 | |
| 力控模式 | 恒力控制/变速控制 |
| 力控精度 | 1N |
| 力控量程 | 0~200N |
| 温度范围 | 0℃~50℃ |
| 湿度范围 | 20%~80% |
| 防水等级 | IP65 |