
品牌
生产厂家厂商性质
深圳市所在地
本公司承诺免费质保一年!终身维护!
80ST-M04025伺服套装
110法兰全系列
130法兰全系列
带有主轴伺服功能伺服套装,售价在原普通型价格基础上加收600元
如有需要请我司客服人员
本套普及型伺服驱动器+1.5KW伺服电机整套伺服系统伺服标配伺服电机为:110ST-M05030,110法兰,1.5KW,5Nm,3000转。

伺服驱动器主要控制方式:
1、位置脉冲控制:有3种,脉冲加方向(CP+DIR);正、反转控制(CW+CCW);90°正交脉冲(A+B)。
2、模拟量速度控制,模拟量0-10V电压控制电机转速,可以实现正反转和回零(或准停)功能。
3、内部速度控制,通过设置驱动器参数来电机运行速度。可以zui多预先设置8段速度。
4、位置定长控制,通过设置驱动器的参数来电机移动距离和运行速度,可以实现正反移动。
5、实现主轴伺服功能,可以实现速度控制和位置控制切换,准停功能。(注意:需要这种功能的请与客服,普及型的是不带这个功能。)
答客户问:
为什么你们的价格做得这么低呢?产品质量怎么样?
1:在管理上,我们采用扁平化管理,使得企业运作成本大大减低了。
2:我们采用网络直销模式,减低中间环节的费用将利润留给客户。
3:元器件我们采用的都是世界,保证驱动器性能稳定可靠。
4:PCB工艺我们采用沉金工艺,SMT贴片加工。
伺服驱动器主要核心部件:
1:采用TI的(DSP)数字信号处理器和ALTERA的复杂可编程逻辑器件(CPLD)做为运算单元

2:滤波电容采用日本*的红宝石铝电解电容

3:电流传感器使用霍尼韦尔HoneyweLL

4:采用日本三菱智能功率模块(IPM)


5:PCB板采用沉金工艺

6:采用全铝合金的外壳,使得散热效果非常好。
7:伺服电机采用日本TAMAGAWA 的增量式光电编码器


清单:
1、伺服电机一台
2、伺服驱动器一台
3、编码器线一根(3米)
4、电机电源线一根(3米)
5、25芯并口接头一个
6、说明书一本
电机材料
1.航空插座使用的是重强品牌,(镀金)
2.漆包线使用的180T,耐高温180度
3.稀土永磁材料使用的是江西一家上市公司,型号为SH-T,每一块磁通量相差不超过1%(稳定性),在150高温烘箱烘烤2个小时,反复三次,然后测试永磁材料,退磁率不超过3%
伺服驱动器型号:DSD
功率:该伺服驱动器适配功率为100W~1.2KW电机
自主研发的新一代全数字交流伺服驱动器,主要采用数字信号处理器DSP技术和大规模可编程FPGA技术为核心的运算单元,及智能IPM功率模块,具有响应速度快,保护完善,可靠性高等一系列优点。
调速比为1:5000,从低速到高速都具有稳定的转矩特性
控制定位精度±0.01%,300%的过载能力
采用空间矢量控制算法,比普通的SPWM 产生的力矩更大,噪音更小
完善的保护功能:过流,过压,过热和编码器故障
多种显示功能:包括电机转速、电机电流、电机位置、位置偏差、脉冲个数、脉冲频率、直线速度、输入输出接口诊断、历史报警记录等
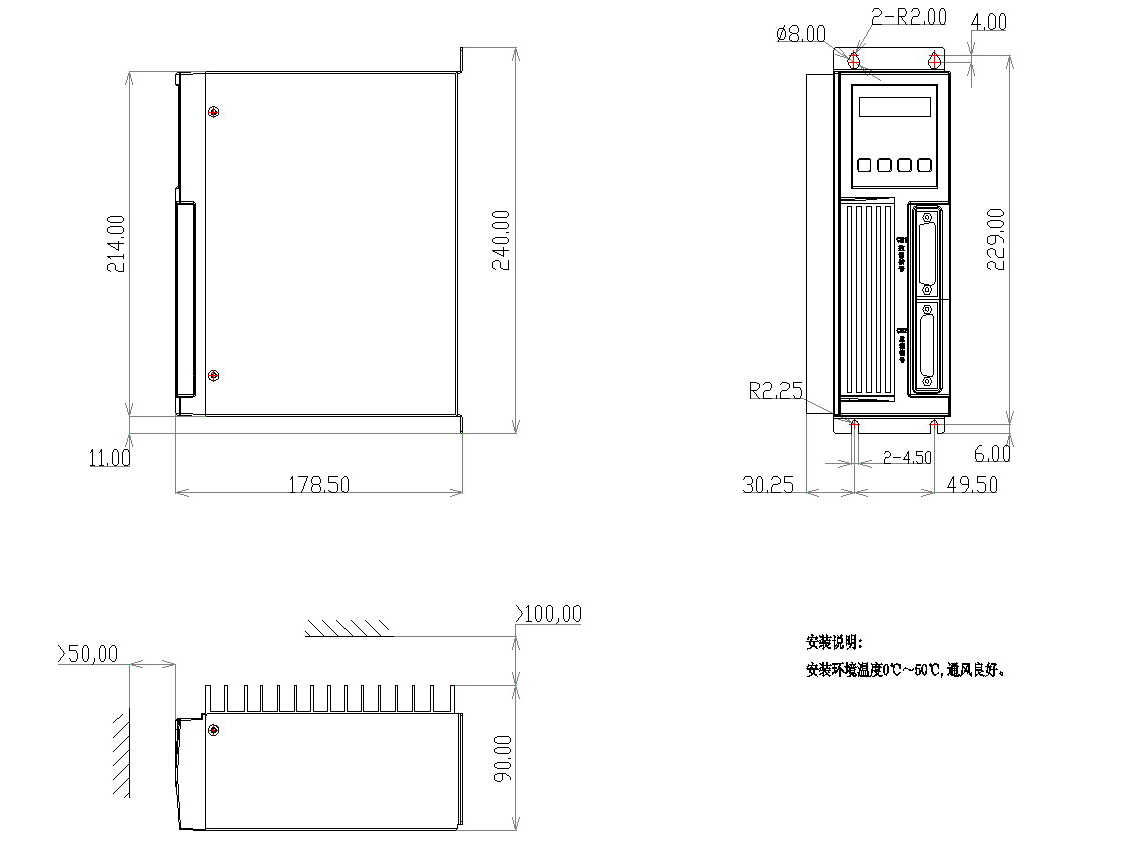
DSD10伺服驱动器是基座安装型伺服驱动器
储存条件:在未通电的状态下储存伺服驱动器时,请在下述温度范围内进行储存:-20 ~ +85 ℃安装场所
控制柜内的环境条件:
1.伺服驱动器的环境温度:0 ~ 55 ℃
2.湿度:90%RH(相对湿度)以下
3.振动:4.9m/s2
4.不要出现冻结、结露等现象
5.为了保证*使用的可靠性,请在低于45 ℃的环境温度条件下使用
与模拟指令输入电路的接口:模拟信号是速度指令信号和转矩指令信号,指令输入阻抗约40kΩ,输入信号的zui大允许电压为±10V与输入电路的接口:使用继电器或者集电极开路的晶体管电路来连接。使用继电器连接时,请选定微小电流用继电器。如果不使用微小电流用继电器,则会造成接触不良。与总线驱动器输出电路的接口:将编码器的2相(A相,B相)脉冲的输出信号(PAO、/PAO、PBO、/PBO)和原点脉冲信号(PCO、/PCO)通过总线驱动器输出电路进行输出。通常当在上位装置侧构成位置控制系统时使用。在上位装置侧,请使用线接收电路接收。与输出电路的接口:伺服报警、伺服准备就绪以及其它的顺序用输出信号由光电耦合器输出电路构成。使用继电器、线接收电路连接。
自动调谐
通过采用了新的算法的惯性恒等功能和5种调谐特性选择、30级响应性设定或利用参数的自动保存功能,可实现提高响应性的自动调谐。
控制方式切换
位置控制、速度控制、力距控制这三种控制形式被合为一体,可在运动中切换。
电源高次谐波对策
标准装备有DC扼流圈子连接端子作为电源高次谐波的对策用。
6位显示LED、内置操作键盘
能在现场方便地进行设定或监控。可以用内置操作键盘进行参数变更、监控装置和报警追迹的调整等。
减振控制
利用前馈减振控制,可通过简单的调整来抑制机械前端的振动和机架的振动。同时,能够设定并选择使用4种用以控制振动的频率。
缩短了定位整定时间
通过采用新算法,可大幅度地缩短装置的定位整定时间。
指令追踪抑制
采用新的位置和算法,可使位置抑制追踪能力提高到现有模型的两倍,并且,基本可实现零位置偏差。
试运转功能(微动功能)
搭载有能够确认马达和放大器连接的微动功能,不必与上位装置连接,便能进行试运转。
输入与输出信号名称及其功能
输入信号
| 信号名 | 功能 | |
| +24VIN | 顺序信号用控制电源输入:+24V 电源由用户准备。 可以动作的电压范围:+11V ~ +25V | |
| SON | 伺服ON输入,有效后,50ms接收控制指令 | |
| INH | 指令脉冲禁止。 | |
| FSTP | 禁止正转驱动 | |
| RSTP | 禁止反转驱动 | |
| ALR | 报警清除:解除伺服报警状态。 | |
| CLR | 清零信号输入:位置控制时,清除偏移计数。 | |
| RIL | 正转转矩外部限制输入 | |
| FIL | 反转转矩外部限制输入 | |
| VIN | 速度指令输入:±10V。 | |
| TIN | 转矩指令输入: ±10V。 | |
CZ+ | 可编程输出。 | |
/PULS | 指令脉冲输入,光耦隔 | 输入模式 |
输出信号
| 信号名 | 功能 | |
COIN- | 定位结束信号输出,当信置偏差计数器数值在设定的定位范围时,定位完成输出ON | |
| ALM+ ALM- | 报警输出 | |
| RDY+ RDY- | 伺服准备好输出 | |
| BRK+ BRK- | 制动器输出 | |
PAO+ | A相信号 B相信号 C相信号 | 2相脉冲(A相、B相)转换编码器输出信号以及原点脉冲(C相)信号 |
| FG | 如果将输入、输出信号用电缆的屏蔽线连接到连接器外壳上,则可以连接到框架接地线。(地线) | |











